 |

 |
教育実践例 |
 |
|
|
|
二足歩行ロボットを活用したアルゴリズムと問題解決学習教材 |
|
| |
|
| 1.はじめに |
本校は今年で創立106年を迎える学校で,戦前は女学校として戦後は男女共学校として,多くの卒業生を出している。生徒の多くは大学進学を希望しており,理系への進学希望者も2割を超えている。本校での教科「情報」は,2003年情報Aを1年生で2単位履修するカリキュラムで始まった。1年間の授業を終了した後,授業内容を検討し,2005年度から情報Bに変更することになった。そのため,2004年度は情報Aの授業を主としつつ,情報Bの内容を含ませた。そして,2005年度からは情報Bの授業を行っている。
コンピュータの基本は制御であり,われわれの身の周りにある多くの生活用品が1チップマイコンを搭載しており,それで制御が行なわれているということ,日本が誇る制御技術を学ぶことで,理工系はもちろん文系を目指す生徒にも興味関心を持ってほしい,という思いから情報Bの授業を始めることになったのである。ここでは2004年度と2005年度に実施した実践内容を紹介するとともに,情報の科学的理解を深める授業において,今後普及すると思われる二足歩行ロボットの教材としての可能性について述べる。 |
|
|
|
| 2.実践内容 |
(1)Logoによる学習
簡単な英語のコマンドで亀を動かすことができるMSWLogo(※注1)を使って,迷路を脱出する課題学習を行った。亀を動かしながら実際に動作を目で見て,デバッグ作業をしながら,具体的なアルゴリズムを学習した。
▲アルゴリズム学習用教材例

▲自作のLED表示器
次に,同じくLogoを使って,外部出力装置にデータを送ることで,自作のLED表示器とそのシミュレーションの画面上にLEDが点滅する制御の基本と2進数の演算のアルゴリズムを学習した。
(2)産業協力情報授業(※注2)
2004年10月に,CECの産業協力情報授業で社会人講師による高等学校の教科「情報」の実践「世界一のサッカーロボット『VisiON』と制御技術」という授業を2時間実施した。

▲社会人講師による産業協力情報授業
ロボコン大会や愛知万博でのロボットの活躍,福祉ロボット,警備ロボット,レスキューロボットなどが雑誌やテレビで多く紹介されており,生徒の興味関心は高く,このロボットの実演と第一線の技術者による最新技術の解説の授業は,多くの生徒の興味関心を引いた。
| 授業目的:世界最先端のロボット制御技術の実際に触れることで,制御技術の基本を学ぶとともに,ものづくりにおける情報技術の役割や生活への影響など,「社会や産業における情報化」,「生活や産業を支援するロボット」についての理解を深める。 |
| 1時限目:ロボットに命令し,動かしてみよう。 |
2時限目:ロボットはなぜサッカーゲームができるのか?
その秘密を考えてみよう。 |
|
▲産業協力授業の目的と授業内容
一緒に授業を受けていた筆者も,ロボットを活用した情報の授業は,社会や産業における情報化の進展が果たす役割を考えるための教材になりうると共に,アルゴリズムや問題解決学習の良き教材となると感じた。しかし,授業時間が少なく,実際にロボットに触れることができたのは数名であった。フローチャートやアルゴリズムの学習は,机上だけでなく実際に目に見える形での体験型の授業として実習することが効果的かつ重要であると考えている。そのため,この授業の後にロボットの借用を希望したが実現せず,その後は理論のみの授業になってしまった。
(3)開発技術者による講義
翌2005年は前年のロボットの授業を実践すべく,CECの支援を受けて二足歩行ロボットを3台購入した。購入台数が少ないこと,組み立て作業に時間がかかることが予想されたので,放課後に講習という形で実施した。まず,9月にヴィストン社の開発技術者に来校していただき,制御のしくみやロボットに送信するデータフォーマットの話などの,ロボットの操作に関する講義とデモならびに開発の苦労話などを話してもらった。

▲技術者によるロボットデモ
デモ用ロボットは,世界サッカーロボット大会での仕様と同じ型のプロトタイプで,本校で購入するロボットの上位機種である。そのため,動作は機敏で,前転・後転・側転をして,さらに歩くというより走っているように見える動作を眼前で見ていた生徒は驚き,興味を持った。そして,早く作りたいという気持ちになった。
(4)ロボットの組み立てと動作
ロボットを組み立てるにあたり,生徒にものづくりの体験をしてほしいという希望もあり,3名1班のチームで組み立てた。サーボモータの仕組みや動作についての講義をした後,マニュアルに従って組み立てた。部品点数が多く組み立て工程も複雑なため,完成までにおよそ10時間かかった。

▲ロボットの組み立て作業中
▲完成したロボットを持つ生徒
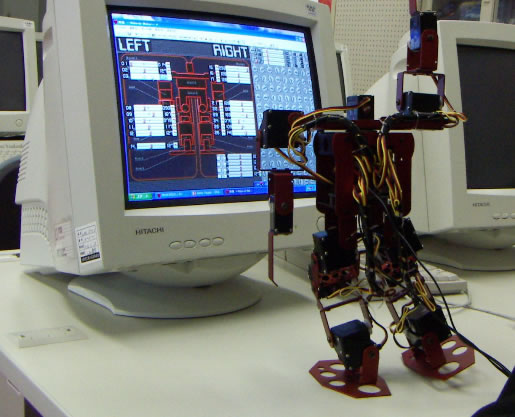
作成したロボットの動きを確認するために,付属のソフトを使って各関節を1つずつ動かして可動範囲を確認し,スムーズに動くかどうかを調べた。
次に,静的な動きから徐々に動的な動きになるように3段階の課題を与えた。1つ目はラジオ体操,2つ目はうつ伏せで寝ている状態から立つまでの動作,最後は動的な動作としての二足歩行,である。
同時に,動作分析を工学と生物へ応用するバイオメカニズムや,人間の効率的な運動への応用としてのバイオメカニクスという学問の紹介もして,生徒の興味・関心を引き出そうとした。

▲ロボットの動作確認中 |
|
|
|
| 3.二足歩行ロボットの教材としての可能性 |
ロボットには制御技術,人工知能などの工学の英知を集めた技術がたくさん詰まっている。日本が誇るこのロボット技術を教科「情報」において直接体験することで,制御技術の基本を学ぶとともに社会や産業における情報化の進展が果たす役割や影響を,より効果的に考えることができる。また,実習を通じて理解することの重要性が言われており,生徒が直接ロボットに触れて自分の思い通りに動作させ知的好奇心が起これば,そこから発展させて創造性につながる教材ができる。
実用段階に入った二足歩行ロボットをどのように活用すれば,情報の教材としてアルゴリズムの学習ならびに問題解決学習に役立つかを,生徒と一緒にロボットを操作しながら考察した。
(1)組み立て作業
ものづくりの観点から,このような最先端の二足歩行ロボットを組み立てることができるのは,すばらしいことである。
今回購入したロボットは,チームを組んで完成させるのに10時間が必要であった。そのため,授業の中に組み込むのは組立作業自体が授業目標の場合は良いが,そうでない場合には時間的に困難である。また,複数回の組立・分解を前提にロボットが作られていないため,授業の中で何度も組立・分解を行うのは難しい。
教育用ロボットとしては,授業の目的に応じて何度も組立と分解ができることが望ましく,それが高精度に動けばなお良い。
(2)関節のモータの数
人間的な動作をロボットにスムーズにさせるには,人間の関節と同じ数のモータが必要であるが,実際にはモータの数が少なくても同じような動作は可能である。
多少不自然ではあるが,動作を工夫すること自体が教材となるため,必ずしも人間の関節と同じ自由度である必要はない。
(3)関節のモータの位置
人間の関節は非常にうまくできていて,同じ位置で3軸の動作を行う関節もある。しかし,ロボットの場合はモータが一定の大きさを持ち,さらに取り付ける金具が必要なため,実際の人間の関節と同じ位置にモータを取り付けられない。2関節以上の回転動作が同一地点ではなく,ずれてしまう。そのため,人間の動作をそっくりまねて動作することはできないが,工夫することで似た動作は可能である。
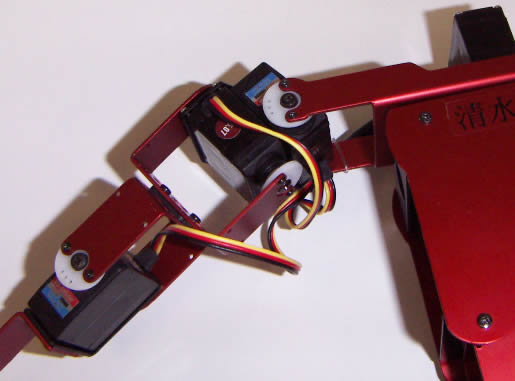
▲肩関節のモータの位置
(4)課題動作
人間の動作は多くの関節が総合的に動くことでスムーズな動作になるが,ロボットの場合にはモータの数と取り付け位置が違うこともあり,人間と同じ動作を追求するのは無理である。しかし,動作を工夫することで同じような動作を再現できる。多関節を同時に動かすことで,どうすれば人間に近い動作ができるかを考えることが学習課題となる。
今回利用したロボットは,17自由度あり,初心者がそれらを同時に制御するのは難しい。そこで生徒に与える課題は,単純な動作から複雑な動作へとレベルを変えて操作を習熟していけることが必要になる。実際にはラジオ体操,起きあがり,歩行の3つの課題を設定した。
ラジオ体操の課題については,生徒は普段から慣れ親しんでいる動作なので,単純に手や足を動かしたり,それらと上肢を供応して動かすことで基本的な操作を習得できるため,ロボットの初歩的な課題として適切である。
▲右手・右足を上げた状態
次のうつ伏せ状態から立つまでの動作についての課題は,ロボットが立つという動作が,重心を意識しないとバランスが崩れるし,その重心が足の基底面上にないと倒れてしまうということに気づくこと,そして手足や胴体を動かして重心を移動させ,安定した状態でうつ伏せの状態から立ち上がることである。この課題を解決するに当たり,生徒自身が寝ている状態から起きるまでを具体的に動作し,意識することで,重心の位置や動かす手足の位置や角度を考えて,アルゴリズムを見つけていく
ことができる。
二足歩行課題は,歩行によるバランスの取り方のアルゴリズムを人間の動作と比較して,重心の位置を考えながら片足ずつ体重移動をして,少しずつ動かしていくのである。
(5)教材としての可能性
実習するにあたり,操作する関係で1人1台ずつのロボットがあるのが望ましい。現在の二足歩行ロボットは高価なため人数分用意するのは困難であるが,安価になれば授業で利用できる。実際に動かしてみて,以下の点が教材としてふさわしいことがわかった。
①動作の意識化
モータで動くおもちゃの自動車のように安定した動作をする世界からみれば,不安定なロボットを動かすこと自体が異次元の世界への一歩となりうるということである。すなわち,二足歩行ロボットは,重心を意識しないと転倒するし,操作をアルゴリズム的に考えないとうまく動かないという点で人間の無意識な行動を意識化でき,アルゴルズムを考える必然性を理解できる。
②アルゴリズムの類似性
アルゴリズムを考える際に,二足歩行ロボットの動作自体が人間の動作に類似しているため,アルゴリズムがわからない場合は自分自身の動作が解答になる。 |
|
|
|
| 4.おわりに |
授業での実践の紹介をし,二足歩行ロボットを使った情報Bの教材の可能性について検討した。
今年に入って安価な単純な3軸や4軸の歩行ロボットも発売され始めた。これらは昔の二足歩行ロボットというよりヒューマノイドロボットからの進化としての単純化されたロボットであり,歩行としての重心移動の学習も可能な教材である。今後,このような単純化されたロボットで制御の基礎を学習できるようになると思われる。 |
|
|
|
|
|
 |